A Course on Numerical Linear Algebra¶
Instructor: Deniz Bilman
Textbook: Numerical Linear Algebra, by Trefethen and Bau.
Lecture 10: Householder Triangularization¶
This is another approach to compute QR factorization of a matrix.
Let's remember the reduced QR factorization obtained via Gram-Schmidt iteration. The Gram-Schmidt iteration applies a succession of elementary triangular matrices $R_k$ on the right of $A$ so that the resulting matrix $Q$ has orthonormal columns:
$$ A \underbrace{R_1 R_2 \cdots R_n}_{\hat{R}^{-1}}=\hat{Q} $$Fact: The inverse of an invertible upper-triangular matrix is upper-triangular.
Fact: The product of two upper-triangular matrices is upper-triangular.
So, the product $\hat{R} = R_n^{-1} \cdots R_2^{-1} R_1^{-1}$ is also upper-triangular and we have $A = \hat{Q}\hat{R}$ is a reduced QR factorization of $A$.
Householder¶
Householder algorithm constructs $Q$ as a product of unitary matrices, instead of constructing $R$. It applies a succession of elementary unitary matices $Q_k$ on the left of $A$ so that the resulting matrix is upper-triangular:
$$ \underbrace{Q_n \cdots Q_2 Q_1}_{Q^*} A=R $$The product $Q=Q_1^* Q_2^* \cdots Q_n^*$ is unitary too, and therefore $A=Q R$ is a full QR factorization of $A$.
So the perspective is the following.
Gram-Schmidt: triangular orthogonalization,
Householder: orthogonal triangularization.
Householder Reflectors¶
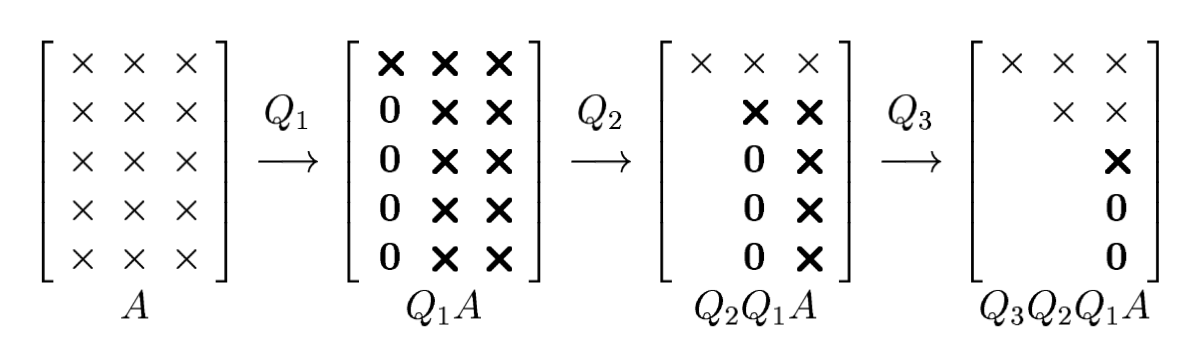
How do we construct the unitary matrices $Q_k$ to introduce zeros in the lower-triangular part of the matrix to arrive at an upper-triangular matrix?
$Q_1$ is a unitary matrix that rotates the first column of $A$ to lie on one coordinate axis.
$Q_2$ leaves the first row invariant (acts as identity), and performs a similar rotation on the vector consisting of the remaining entries of the second column of $Q_1 A$.
$Q_3$ leaves the first two rows invariant (acts as identity), and performs a similar rotation on the vector consisting of the remaining entries of the third column of $Q_2 Q_1 A$.
And so on...
The unitary matrices $Q_k$ are constructed using Householder reflectors.
Each $Q_k$ is an $m\times m$ matrix that is of the form
$$ Q_k = \begin{bmatrix} \mathbb{I}_{(k-1)\times (k-1)} & \mathbf{0} \\ \mathbf{0} & F\end{bmatrix}, $$where $F$ is an $(m-k+1)\times (m-k+1)$ matrix that introduces zeros into the $k$th column as described above. The Householder algorithm chooses $F$ to be a particular matrix called a Householder reflector.
F acts on $x\in \mathbb{C}^{m-k+1}$ as
$$ F x = \begin{bmatrix} \|x\|_2 \\ 0 \\ 0 \\ \vdots \\ 0 \end{bmatrix} = \|x\|_2 e_1 $$with $e_1 \in \mathbb{C}^{m-k+1}$. Note that $F^* F = \mathbb{I}$.
Let's understand the role of $F$ better. Given a vector $x$,let
$$ v = \|x\|_2 e1 - x. $$$F$ reflects the sapce $\mathbb{C}^{m-k+1}$ across the hyperplane $H$ orthogonal to $v = \|x\|_2 e1 - x$.
When the reflector is applied, every point on one side of the hyperplane $H$ is mapped to its mirror image on the other side. In particular, $x$ is mapped to $\|x\| e_1$.
We know that for any vector $y$
$$ P y=\left(\mathbb{I}-\frac{v v^*}{v^* v}\right) y=y-\left(\frac{v^* y}{v^* v}\right)v $$is the orthogonal projection of $y$ onto the space $H$. But to reflect $y$ across $H$, we must not stop at the point obtained by subtracting $\left(\frac{v^* y}{v^* v}\right)v$, we must subtract one more copy of that vector. Therefore, the reflection $Fy$ should be given by
$$ F y=\left(\mathbb{I}-2 \frac{v v^*}{v^* v}\right) y=y-2 \left(\frac{v^* y}{v^* v}\right)v $$We have already seen that
$$ F = \mathbb{I} - 2 \frac{v v^*}{v^* v} $$is a unitary matrix (hence of full rank). Note that the projector $P$ involved in the process is not full rank and it differs from $F$ just by a factor of $2$.
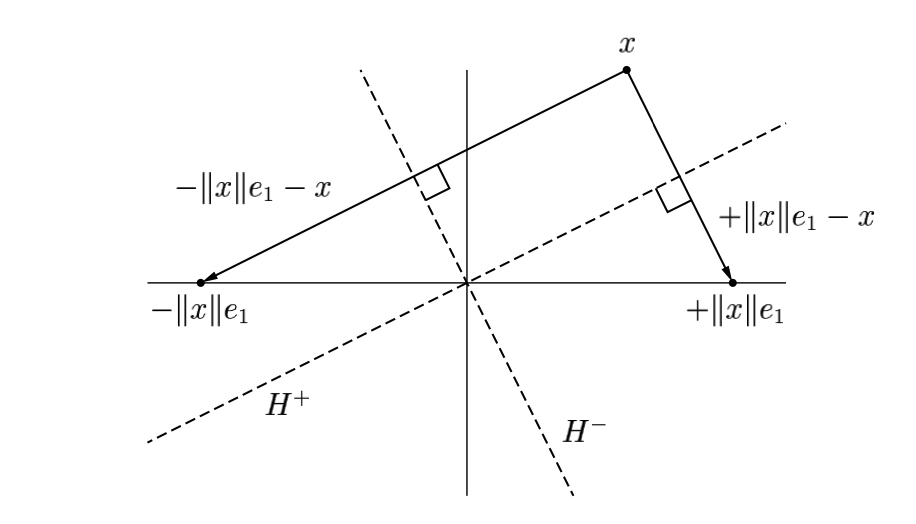
The Better of Two Reflectors¶
Well, we have been a bit ignorant so far. As can be seen in the Figure above, even in the real case, there exists two reflectors. The vector $x$ can be reflected to $\pm \|x\|_2 e_1$, i.e. reflected across the hyperplane $H^+$ that is the set of vectors orthogonal to $\|x\|_2 e_1 -x$ or the hyperplane $H^-$ that is the set of vectors orthogonal to $-\|x\|_2 e_1 -x$. In the complex case, there is an infinitude of such choices! The vector $x$ can be reflected to $z \|x\|_2 e_1$, where $z$ is any scalar with $|z|=1$ --- a circle of possible reflections.
For numerical stability, it is desirable to reflect $x$ to the vector $z\|x\|e_1$ that is not too close to $x$ itself, so we may choose $z=-\operatorname{sign}(x_1)$, where $x_1$ denotes the first component of $x$. So the reflection vector becomes $v=-\operatorname{sign}(x_1)\|x\|_2 e_1 -x$. Clearing the factors of $-1$, this reads
$$ v=\operatorname{sign}(x_1)\|x\|_2 e_1 + x $$We also impose the convention that $\operatorname{sign}(x_1) = 1$ if $x_1=0$.
Why is doing this is better? In what sense it is better?¶
Again look at the figure (in the real case):
See, the angle between $H^+$ and the $e_1$ axis is very small compared to the angle between $H^-$ and the $e_1$ axis. The vector $v=\|x\|_2 e_1 -x$ relevant for $H^+$ is therefore smaller than $x$ or $\|x\|_2 e_1$ and the calculation of $v$ will involve subtraction of nearby quantities and will suffer from cancellation errors. If we pick the other sign, we make sure that $\|v\|_2$ is never smaller than $\|x\|_2$.
An Implementation¶
using LinearAlgebra
function householder_qr(A)
m, n = size(A)
R = copy(A)
Q = Matrix{Float64}(I, m, m)
for k in 1:min(m-1, n)
x = R[k:m, k]
e1 = zeros(length(x))
e1[1] = norm(x)
v = x + sign(x[1]) * e1
v = v / norm(v)
Hk = Matrix{Float64}(I, m, m)
Hk[k:m, k:m] -= 2 * (v * v')
R = Hk * R
Q = Q * Hk'
end
return Q[:, 1:n], R[1:n, :]
end
# function householder_qr(A)
# m,n = size(A)
# Qstar = diagm(ones(m))
# R = float(copy(A))
# for k in 1:n
# z = R[k:m,k]
# w = [ -sign(z[1])*norm(z) - z[1]; -z[2:end] ]
# nrmw = norm(w)
# if nrmw < eps() continue; end # skip this iteration
# v = w / nrmw;
# # Apply the reflection to each relevant column of A and Q
# for j in 1:n
# R[k:m,j] -= v*( 2*(v'*R[k:m,j]) )
# end
# for j in 1:m
# Qstar[k:m,j] -= v*( 2*(v'*Qt[k:m,j]) )
# end
# end
# return Qstar',triu(R)
# end
householder_qr (generic function with 1 method)
A = rand(float(1:9),8,5)
m,n = size(A)
A|>display
Q, R = householder_qr(A)
Q|>display
R|>display
8×5 Matrix{Float64}:
4.0 6.0 5.0 2.0 5.0
5.0 8.0 1.0 1.0 5.0
6.0 5.0 2.0 3.0 2.0
2.0 6.0 7.0 4.0 4.0
7.0 1.0 6.0 6.0 5.0
3.0 5.0 8.0 8.0 4.0
7.0 8.0 3.0 4.0 5.0
8.0 6.0 7.0 8.0 8.0
8×5 Matrix{Float64}:
-0.251976 -0.270475 0.131998 -0.652293 -0.0517987
-0.31497 -0.396449 -0.439054 -0.0386867 -0.348074
-0.377964 0.0611347 -0.273822 0.0538295 0.73109
-0.125988 -0.485372 0.461738 -0.267347 0.155994
-0.440959 0.63543 0.262003 -0.295208 0.0364161
-0.188982 -0.261212 0.555793 0.554219 0.151175
-0.440959 -0.181552 -0.322123 0.188621 0.111356
-0.503953 0.159321 0.142525 0.262222 -0.529862
5×5 Matrix{Float64}:
-15.8745 -14.6146 -12.2209 -12.4098 -13.2918
2.57988e-16 -8.56812 -2.73068 -0.424238 -2.65473
-2.02691e-17 1.74121e-17 8.95512 6.72049 2.82679
6.83208e-16 4.03504e-18 2.84441e-16 3.26359 -0.634911
8.08768e-17 -2.20948e-16 -2.88384e-17 3.12092e-16 -2.80854
norm(A - Q*R)
1.608751089108294e-14